伺服驱动器,又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,是传动技术的高端产品
伺服驱动器在控制信号的作用下驱动执行电机,因此驱动器能否正常工作直接影响设备的整体性能,在伺服控制系统中,伺服驱动器等效于大脑,执行马达等效于手和脚,伺服驱动器在伺服控制系统中的作用是调节电动机的速度,因此它也是一种自动速度调节系统。
伺服驱动器的工作原理:驱动器的核心主控制板,继电器板传输驱动器的控制信号和检测信号,以完成双闭环控制,包括速度调节和电流调节,以实现电动机的速度控制和换向控制,驱动器的驱动板从主控板接收信号,驱动电源转换电路,实现电机的正常运行。
伺服驱动器内部结构:伺服驱动器的内部结构包括电源电路,继电器板电路,主控制板电路,驱动板电路和电源转换电路,电源电路的功能是将外部输入的直流电转换为不同大小的直流电输出,并为后续的继电器板,驱动板和电源转换电路提供直流电,继电器板的功能是提供直流电,以完成控制信号和检测信号的传输。
通常,伺服驱动器具有三种控制模式:位置控制模式,转矩控制模式和速度控制模式。
位置控制模式通常通过外部输入脉冲的频率确定转速,并通过脉冲数确定旋转角度,一些伺服器可以通过通信直接为速度和位移分配值,由于可以同时严格控制位置和速度模式,因此通常用于定位设备。
转矩控制模式是通过外部模拟量或直接地址分配的输入来设置电动机轴的外部输出转矩,可以通过立即更改模拟量的设置来更改设置扭矩,或者可以通过通讯更改相应地址的值来实现。
旋转速度可以通过模拟输入或脉冲频率进行控制,位置模式还支持直接负载外环检测位置信号,此时,电动机轴端的编码器仅检测电动机速度,位置信号由终负载端的直接检测装置提供,这具有减少中间传输过程的误差,该优点提高了整个系统的定位精度。
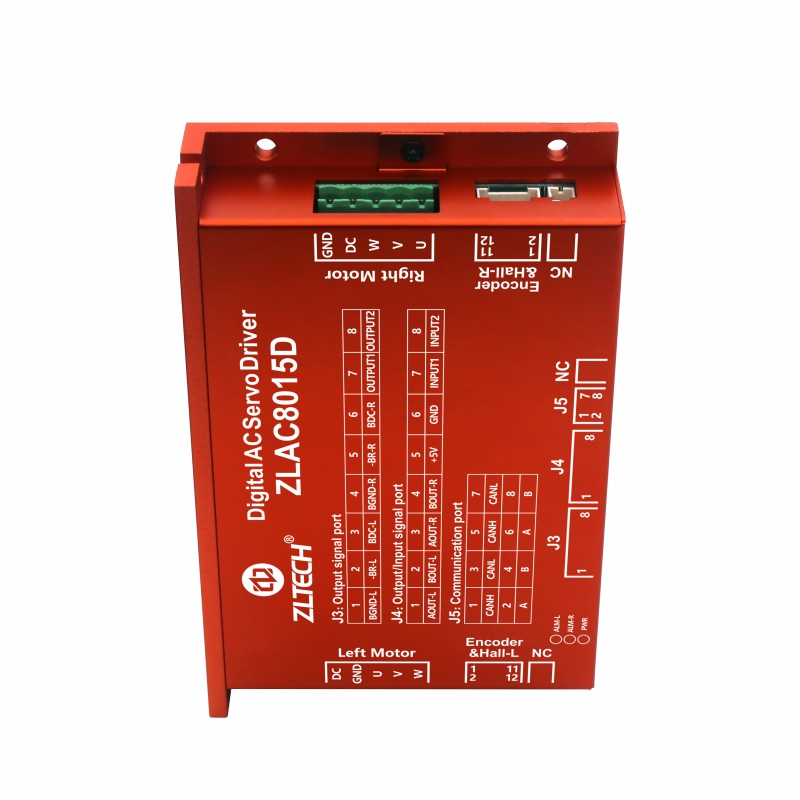
深圳维多利亚vic登录地址科技自2013年成立以来,一直致力于服务机器人行业,研发、生产和销售结构简单、性能稳定的伺服驱动器。其高性能数字式伺服轮毂电机驱动器ZLAC8015、ZLAC8015D、ZLAC8020D、ZLAC8030L和ZLAC8030D,支持CANopen通信和RS485通信控制,以保证对服务机器人的运动控制更为可靠、灵活。